Důležitou otázkou v konstrukci elektrických motorů ve XX. století je otázka zdokonalování třífázových motorů. V řešení této otázky mám mnoho praktických zkušeností. Uvádím své nejdůležitější konstrukce, téměř ve všech kulturních státech patentované.
Roku 1922 byl mi v Československu udělen patent číslo 12.255 na automatickou fázovou kotvu olejovou, kterou jsem se snažil jednak automatisovati postup ručního spouštění třífázového elektromotoru, jednak dosáhnouti velkého závěrového momentu při nejpříznivějším náběhovém proudu, tedy spojiti výhody motoru s kotvou na krátko s výhodami motorů kroužkových. Oproti dosud známým systémům automatických spouštěčů zakládá se tato kotva na principu hysteresním velmi účelné jednoduché konstrukce, tj. na využití ztrát, které vznikají při magnetizování železa. V litinovém pouzdře vedeny jsou dvě jádra z kujného železa J, posuvná směrem ze středu a přitlačovaná spirálovými pery ke hřídeli. Kol jáder umístěny jsou cívky C, připojené jedním koncem k pouzdru, druhým k zahnutému ocelovému peru P, které jest od pouzdra isolováno, a současně jest zařízeno zapojení k vinutí rotoru, provedené obyčejně dvoufázově. Při rozběhu prochází rotorový proud cívkami C, které normálně při plném magnetickém toku a největší rotorové frekvenci kladou takový odpor, že zůstává náběhový proud při spouštění asi 1,5 násobný proudu při plném zatížení a lze dosáhnouti libovolného záběrového momentu až do 2,5 násobného normálního změnou počtů závitů na cívkách C. Jádra jsou při rozběhu hnána odstředivou silou ze středu a cívky ztrácejí tím induktivní odpor, až konečně přitlačí jádra odstředivou silou péra P na kostru a spojí vinutí rotoru na krátko. Zastaví-li se motor, přitlačí se jádra automaticky ke hřídeli, péra rozpojí vinutí na krátko a motor jest připraven k dalšímu spouštění.
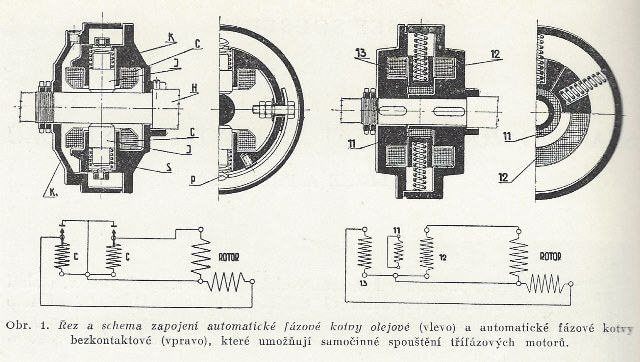
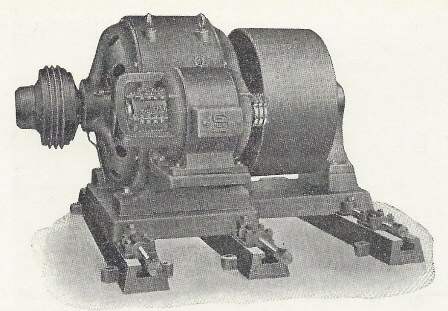
V roce 1928 (podle patentu č. 23.658), zavedl jsem novou automatickou kotvu bezkontaktovou, hodící se pro zvlášť těžké provozy. Kotva (obr.) jest téhož principu jako předešlá, avšak s tím rozdílem, že se zde rotorový proud nepřerušuje, nýbrž cívky 13, 13 ztrácejí induktivní odpor a zůstávají po rozběhu do rotorového kruhu zapojeny, ježto jejich ohmický odpor jest nepatrný a účinnost stroje tím netrpí. Mimo to jest kotva opatřena prstencem 11, který působí až po rozběhnutí stroje jako závit na krátko a potlačuje tendenci samoindukcí.
Výše uvedenými konstrukcemi hleděl jsem vyhověti i nejtěžším požadavkům techniky automatického spouštěče, hodícího se pro všechny výkony i reversační pohony, vyznačující se též velkou lácí pro svoji jednoduchost a téměř žádné opotřebení a další výhody v provozu. Ušetří se minimální automatický vypinač, který úplně nahrazuje v určitých případech i uzavřenou konstrukci, ježto nemá žádných jiskřících součástí a zmíněná automatická kotva se i při častém spouštění zcela nepatrně zahřívá, tím že její hmoty jest 100% využito a že je v rotaci velmi dobře chlazena.
Nejdůležitější technickou úlohou pro motory třífázové je problém regulace otoček. Dosavadní regulování otoček indukčních motorů pomocí rotorového, skluzového odporu je sice velmi jednoduché, jde však na úkor spotřebované energie, takže při regulaci otáček o 50 % dolů ztrácí se kromě cca 10 % energie v účinnosti motoru ještě dalších 50 % v odporech. V mnoha případech se tento způsob regulace pro svoji nestálost počtu otoček ani nehodí.
Velkým pokrokem bylo zavedení motorů kolektorových. Všeobecně se stává kolektorový motor ze statoru normálního asynchronního motoru a z rotoru, který jest podobný jako u stejnosměrného stroje a jest opatřen kolektorem. Oproti indukčnímu motoru přivádí se zde napětí nejen do statoru, nýbrž též na rotor. Následkem toho jest zde frekvence rotorového napětí neodvislá též na rotor. Následkem toho jest zde frekvence rotorového napětí neodvislá od otoček rotoru, nýbrž rovná se vždy frekvenci síťové. Podle zapojení mezi statorem a rotorem určuje se pro tyto motory průběh otoček a točivého momentu a jde takto buď o trojfázové komutátorové motory seriové anebo o motory derivační. Regulování otoček provádí se zde buď natáčením kartáčků aneb změnou přiváděného napětí.
V rámci pojednání nebylo by možné popsati různé systémy těchto strojů, neboť vytvořila téměř každá firma vlastní svoje provedení.
Provedl jsem ve svém závodě také regulační motor podle vlastního patentu s úspornou regulací otoček pro velké rozsahy, která se vyznačuje tím, že se skluzová energie při regulaci vrací zpět do sítě a neničí se tudíž v odporech, jak jest tomu u odporové regulace asynchronních motorů. Jedná se o trojfázový kolektorový motor s napájením statoru i rotoru a se specielním zařízením komutačních pólů, které dovolují použíti poměrně vysokého napětí na kolektoru při bezvadné komutaci.

Obr. znázorňuje pracovní diagram regulačního motoru o výkonu 90 ks při 375 otáčkách v minutě, regulovatelného od 30 až 375 otoček za minutu a značí kW 1 efektivní výkon motoru na hřídeli, kW 2 příkon v kW při ekonomické regulaci a kW 3 ke srovnání příkon v kW při regulaci odporové. Křivka příkonu motoru oproti příkonu při regulaci odporové umožňuje přímo odečítati ušetřené kW spotřebované energie v provozu při určitých obratech motoru. Průběh křivky účinnosti svědčí o velké hospodárnosti tohoto motoru.
Příznačná pro shora projednané regulační elektromotory jest jejich derivační charakteristika. Nastavené obrátky rostoucím zatížením klesají pouze o skluz jako u motorů asynchronních a tento skluz je stejný, ať již jde o obrátky synchronní, pod-, či nadsynchronní. Podle potřeby možno motor zaříditi též pro rozsah regulace od nuly až do maxima otoček. Jelikož vykazuje motor v celém rozsahu regulačním úplně konstantní točivý moment, jest přirozené, že při regulaci klesá výkon jeho úměrně s obrátkami a naopak roste úměrně se zvýšenými obrátkami i v nadsynchronismu.
Stejného točivého momentu jest však třeba pouze v málo případech pohonů. Požadavky regulace otoček ve velkém rozsahu jsou ztěžovány podmínkami změny odporu točivého momentu; na příklad vyžadují válcovací stolice železa, stroje papírnické, stroje obráběcí, apod. největšího točivého momentu při nižších regulovaných otočkách, kdežto pohon ventilátorů, odstředivých čerpadlech apod. liší se od nich tím, že roste výkon s regulovanými otočkami třetí mocninou, takže motor k jejich pohonu musí býti dimensován na výkon odpovídající maximálním otočkám, tím není motoru ani zdaleka využito při nižších otočkách, pracuje se špatnou účinností i horším pošinutím fáze.
Z uvedeného vysvítá důležitost i obtíže problému vyřešiti řadu složitých provozů a pohonů trojfázovými motory a velkým rozsahem regulace. Řešil jsem tento problém a přihlásil jsem na počátku roku 1931 k patentu trojfázový regulační elektromotor pro libovolný rozsah regulace s proměnlivým točivým momentem.
Velký vliv na vývoj trojfázových motorů měl v minulých letech požadavek dobrého účiníku, tj. spotřeby magnetizační energie. Jest všeobecně známo, že třífázové asynchronní motory a transformátory, vůbec stroje na elektromagnetickém principu, potřebují k vytvoření magnetického pole magnetizační proud, který jinak pracovního účiníku nemá a způsobuje pošinutí proudu oproti napětí a vzniká tak vlivem fázového posunu neúplné využití elektrárny, rozvodné sítě a zbytečně velký úbytek napětí v síti. Nutno uvážiti, že špatný účiník znamená nejen ztráty provozové tím, že se snižuje účinnost celého zařízení, ale též ztráty investiční, neboť nutno pořizovati generátory, transformátory a rozvodné sítě v poměru zhoršeného účiníku větší.
Snahy po zlepšení účiníku vyvolaly nové typy motorů, které vyrovnávají fázový posun; jsou to motory kompensované, které pracují s účiníkem cos. ϕ = 1. Motory tyto mají mimo vinutí pracovní ještě vinutí kompensační a mimo sběrací kroužky též kolektor. Jsou tím poněkud složitější než normální trojfázové motory a vyžadují v provozu odborné obsluhy. V začátku nebyly naděje kladené v kompensované motory zcela splněny a bylo prováděno jednak kompensování stávajících zařízení společnými kompensátory, jednak trojfázovými elektromotory se zvláštním stejnosměrným budičem, tzv. motory autosynchronními.
Roku 1925 udal jsem v patentu č. 27.978 konstrukci kompensovaného motoru se samočinným nastavováním kartáčků, kterým jest obsluha těchto strojů zautomatizována a způsobilá též pro pohony plně automatické a reversační. Konstrukce zmíněného kompensovaného elektromotoru shoduje se celkem s konstrukcí normálních třífázových motorů s automatickou fázovou kotvou podle dříve popsaného patentu č. 12.255, avšak s tím rozdílem, že má stator motoru mimo normální vinutí ještě pomocné vinutí, které jest připojeno na pevný radiální kolektor. Kolektor nazývá se radiální proto, že zde se kartáče netrou jak obvykle po obvodě kolektoru, nýbrž doléhají naň se strany. Dále jest zde kolektor pevně uložen, kdežto kartáčové ústrojí jest zvláštním způsobem upevněno na hřídeli motoru a s ním se pohybuje. K rotujícím kartáčkům jest se tří bodů připojeno normální třífázové vinutí a druhé tři body vinutí jsou vyvedeny do automatické kotvy, kde po náběhu utvoří uzel hvězdového vinutí. Zapne-li se do statorového vinutí proud o 50 periodách, indukuje se v pomocném vinutí proud, který má tentýž počet period a napětí odpovídající poměru počtu závitů a spojení. Tento v pomocném vinutí indukovaný proud vede se kolektorem, kartáčky do třífázového vinutí rotoru jako usměrněný pulsující proud o skluzových periodách, který jest vlastně potřebný pro magnetizaci rotoru, resp. pro vykompensování jalové složky proudu. Předpokládá se zde ovšem podmínka, že přiváděný pulsující proud předbíhá o 90o rotorový proud, neboť jinak by kompensace nenastala. Tohoto předbíhání dosáhne se přesným natočením kartáčků, což značí, že možno takto upraveného motoru použíti pouze pro jeden směr točení. Je-li zapotřebí směr točení obrátiti, jest nutno natočiti kartáčky v opačném směru, což vyžaduje, ježto jest obtížné najíti správnou polohu, odborné obsluhy. Aby bylo možno použíti kompensovaných motorů i při neodborné obsluze, jest motor opatřen zvláštním kartáčkovým držákem, který umožňuje samočinné, správné nastavení kartáčků pro oba směry točení.
Kompensované motory hodí se všude tam, kde jest zatížení kolísavé a vyznačují se tím, že neberou ze sítě jalového proudu, nýbrž při menším mechanickém zatížení zlepšují i účiník sítě.
Kompensované motory popsaného provedení vyrábějí se do výkonů as 15 ks. Stroje větších výkonů stavějí se se zvláštním pomocným komutačním tělesem, které jest opatřeno samostatným vinutím. Princip však zůstává tentýž jako u motorů předchozích.
U popsaných kompensovaných motorů možno dosáhnouti i menšího rozsahu regulace v mezích as 2 % do nad- i podsynchronismu, mimo to mohou běžeti na prázdno též překompensovány a mají pak vlastnosti kompensátorů. Výhod kompensovaných motorů lze však využití pouze při pořizování nových motorů; kde však jde o stávající motory, které pracují se špatným účiníkem, lze s výhodou použíti zvláštních přístrojů kompensačních, kterými jest pak možno zlepšovati nejen špatný účiník nezatížených motorů, nýbrž i celého zařízení.
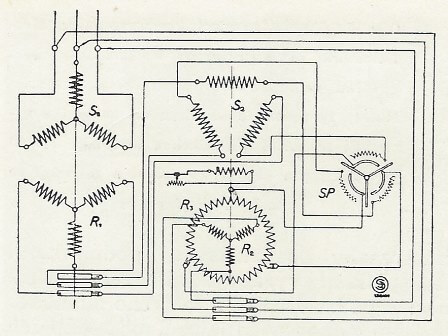
Obr. uvádí schéma kompensačního přístroje zvaného kosinus-reduktoru, které pozůstává v principu v tom, že jest souběžně ke statorovému vinutí motoru S2, který má býti kompensován, připojeno hvězdicové vinutí rotoru R2 kosinus-reduktoru, kterýžto rotor mimo třífázové vinutí jest opatřen ještě vinutím stejnosměrným R3, připojeným ke kolektoru. Rotorové vinutí motoru R1 jest připojeno pomocí kroužků ke statorovému vinutí kosinus-reduktoru S2, kteréžto vinutí sluje reakční. Konce tohoto reakčního vinutí jsou připojeny přes odporový spouštěč na kartáčky kolektoru. Mimo to jest ve statoru kosinus-reduktoru ještě provedeno zvláštní tlumicí vinutí, s regulovatelným odporem. Kosinus-reduktor nabíhá současně s motorem, s kterým jest pouze elektricky spojen, běží s ním synchronně, avšak s příslušným skluzem, oproti počtu period v síti právě tak, jako motor a jeho rotorový proud prochází reakčním vinutím statoru kosinus-reduktoru, kde jest pak vykompensován skluzovým proudem odebíraným přes kolektor ze stejnosměrného vinutí R3. Ježto kosinus-reduktor běží synchronně s motorem, možno voliti obrátky téhož poměru počtu pólů, např. má při 750 otočkách motoru kosinus-reduktor 1500 otoček synchr., čímž vypadne konstrukce jeho menších rozměrů.
Obr. znázorňuje kompensovaný motor s připojeným kosinus-reduktorem o výkonu 150 ks při 580 otočkách v min., 500 voltů, 50 period, a sice pro 100 ks mechanického výkonu a 30 KVAj jalového výkonu ke kompensování sítě, aneb pro 150 ks výkonu mechanického při cos. ϕ = 1.
Pracemi svými směřuji k zdokonalení motorů třífázových tak, aby jich bylo možno použíti v nejširších mezích a při tom ekonomie jejich byla nejlepší. Motor stane se tím ještě vydatnějším pomocníkem lidské práce.
Josef Sousedík, vynálezce a průmyslník ve Vsetíně, Dvacáté století – pokroky průmyslu, Nakladatelství Vladimír Orel 1932